Trojfázový asynchrónny motor
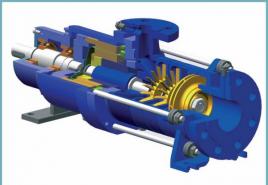
Skladá sa z dvoch hlavných častí - statora a rotora. Stator je pevná časť, rotor je rotačná časť. Rotor je umiestnený vo vnútri statora. Medzi rotorom a statorom je malá vzdialenosť, nazývaná vzduchová medzera, zvyčajne 0,5-2 mm.
Stator indukčného motora
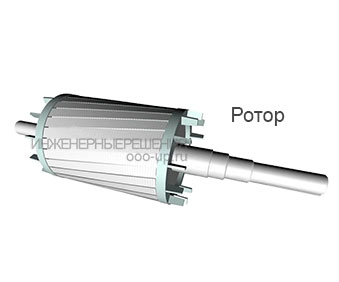 Rotor indukčného motora
Rotor indukčného motora
stator pozostáva z tela a jadra s vinutím. Jadro statora je zostavené z tenkého plechu technickej ocele s hrúbkou 0,5 mm, potiahnutého izolačným lakom. Laminovaná konštrukcia jadra prispieva k výraznému zníženiu vírivých prúdov, ktoré vznikajú pri procese remagnetizácie jadra rotujúcim magnetickým poľom. Vinutia statora sú umiestnené v drážkach jadra.
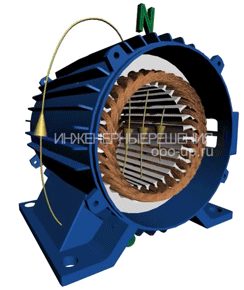
 Skriňa a jadro statora asynchrónneho elektromotora
Skriňa a jadro statora asynchrónneho elektromotora
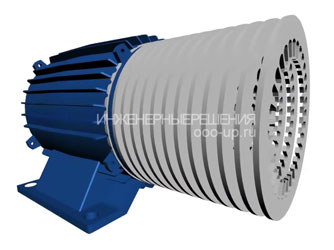 Konštrukcia vrstveného jadra asynchrónneho motora
Konštrukcia vrstveného jadra asynchrónneho motora
Rotor pozostáva z jadra s vinutím nakrátko a hriadeľa. Jadro rotora má tiež laminovaný dizajn. Súčasne nie sú plechy rotora lakované, pretože prúd má nízku frekvenciu a oxidový film je dostatočný na obmedzenie vírivých prúdov.
Princíp činnosti. Rotujúce magnetické pole
Princíp činnosti trojfázového vinutia je založený na schopnosti trojfázového vinutia pri pripojení k sieti trojfázového prúdu vytvárať rotujúce magnetické pole.
Bežať
Stop
Rotujúce magnetické pole indukčného motora
Frekvencia otáčania tohto poľa alebo frekvencia synchrónneho otáčania je priamo úmerná frekvencii striedavého prúdu f 1 a nepriamo úmerná počtu pólových párov p trojfázového vinutia.
 ,
,
- kde n 1 je frekvencia otáčania magnetického poľa statora, otáčky za minútu,
- f 1 - Frekvencia striedavého prúdu, Hz,
- p je počet párov pólov
Koncept rotujúceho magnetického poľa
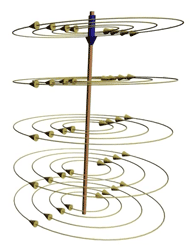
Aby ste lepšie pochopili fenomén rotujúceho magnetického poľa, zvážte zjednodušené trojfázové vinutie s tromi závitmi. Prúd pretekajúci vodičom vytvára okolo neho magnetické pole. Obrázok nižšie zobrazuje pole vytvorené trojfázovým striedavým prúdom v určitom časovom bode.
Bežať
Stop
Magnetické pole jednosmerného vodiča s jednosmerným prúdom
 Magnetické pole vytvorené vinutím
Magnetické pole vytvorené vinutím
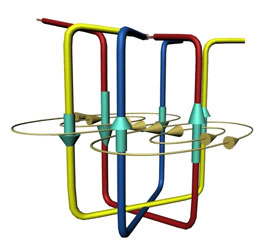
Zložky striedavého prúdu sa časom menia, čo vedie k zmene magnetického poľa, ktoré vytvárajú. V tomto prípade výsledné magnetické pole trojfázového vinutia nadobudne inú orientáciu pri zachovaní rovnakej amplitúdy.
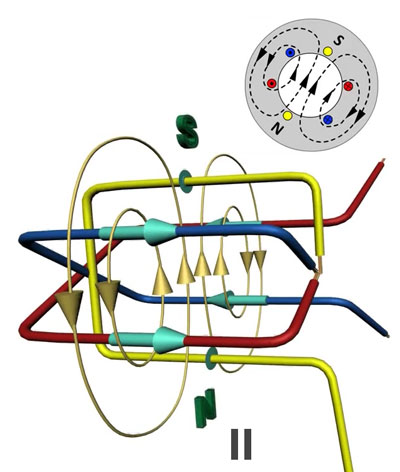
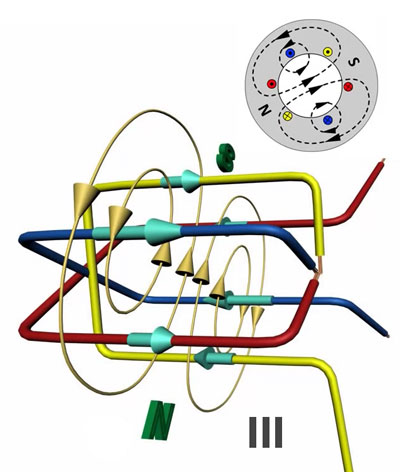
Magnetické pole vytvorené trojfázovým prúdom v rôznych časoch 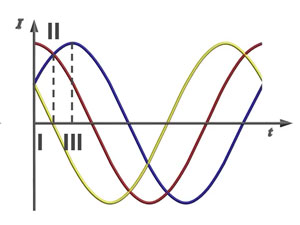 Prúd tečúci v otáčkach elektromotora (posun o 60°)
Prúd tečúci v otáčkach elektromotora (posun o 60°)
Bežať
Stop
Pôsobenie rotujúceho magnetického poľa na uzavretú slučku
Teraz umiestnime uzavretý vodič do rotujúceho magnetického poľa. Zmenou magnetického poľa dôjde k vzniku elektromotorickej sily (EMF) vo vodiči. EMF zase spôsobí prúd vo vodiči. V magnetickom poli teda bude uzavretý vodič s prúdom, na ktorý bude pôsobiť sila, podľa ktorej sa obvod začne otáčať.
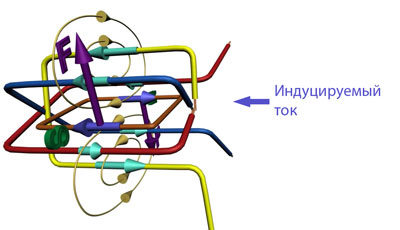 Vplyv rotujúceho magnetického poľa na uzavretý vodič prúdom
Vplyv rotujúceho magnetického poľa na uzavretý vodič prúdom Indukčný motor s rotorom vo veveričke
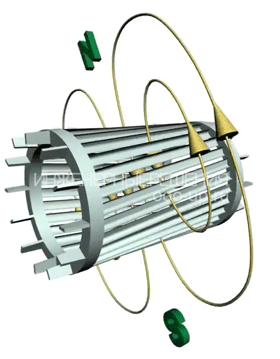
Tento princíp tiež funguje. Namiesto rámu s prúdom vo vnútri asynchrónneho motora sa nachádza rotor s klietkou nakrátko, ktorý dizajnom pripomína veveričkové koleso. Rotor vo veveričke pozostáva z tyčí, ktoré sú na koncoch skratované krúžkami.
 Rotor s klietkou vo veveričke, ktorý sa najčastejšie používa v indukčných motoroch (zobrazené bez hriadeľa a jadra)
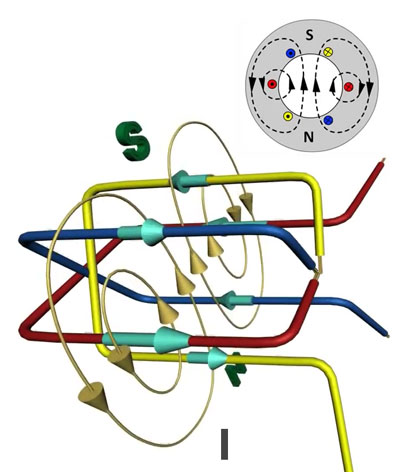
Rotor s klietkou vo veveričke, ktorý sa najčastejšie používa v indukčných motoroch (zobrazené bez hriadeľa a jadra) Trojfázový striedavý prúd prechádzajúci vinutiami statora vytvára rotujúce magnetické pole. Teda, ako už bolo opísané vyššie, v tyčiach rotora sa bude indukovať prúd, v dôsledku čoho sa rotor začne otáčať. Na obrázku nižšie môžete vidieť rozdiel medzi indukovanými prúdmi v stĺpcoch. Je to spôsobené tým, že veľkosť zmeny magnetického poľa sa v rôznych pároch tyčiniek líši v dôsledku ich rozdielneho umiestnenia vzhľadom na pole. Zmena prúdu v tyčiach sa časom zmení.
Bežať
Stop
Rotujúce magnetické pole prenikajúce do rotora vo veveričke
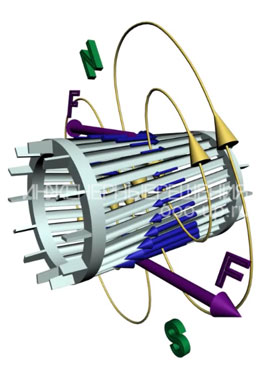
Môžete si tiež všimnúť, že tyče rotora sú naklonené vzhľadom na os otáčania. Toto sa robí s cieľom znížiť vyššie harmonické EMF a zbaviť sa zvlnenia momentu. Ak by boli tyče nasmerované pozdĺž osi otáčania, potom by v nich vzniklo pulzujúce magnetické pole v dôsledku skutočnosti, že magnetický odpor vinutia je oveľa vyšší ako magnetický odpor zubov statora.
Sklzový indukčný motor. Rýchlosť rotora
Charakteristickým znakom indukčného motora je, že rýchlosť rotora n2 je menšia ako synchrónna rýchlosť magnetického poľa statora n1.
Vysvetľuje to skutočnosť, že EMF v tyčiach vinutia rotora je indukovaný iba vtedy, keď sú frekvencie otáčania nerovnaké n 2 Zvážte prípad, keď sa rýchlosť rotora zhoduje s frekvenciou otáčania magnetického poľa statora. V tomto prípade bude relatívne magnetické pole rotora konštantné, takže v tyčiach rotora sa nevytvorí EMF, a teda žiadny prúd. To znamená, že sila pôsobiaca na rotor bude nulová. Rotor sa tak spomalí. Potom bude na tyče rotora opäť pôsobiť striedavé magnetické pole, čím sa zvýši indukovaný prúd a sila. V skutočnosti rotor nikdy nedosiahne rýchlosť otáčania magnetického poľa statora. Rotor sa bude otáčať určitou rýchlosťou, ktorá je o niečo nižšia ako synchrónna rýchlosť. Sklz indukčného motora sa môže meniť od 0 do 1, t.j. 0-100 %. Ak je s~0, potom to zodpovedá režimu voľnobehu, keď rotor motora prakticky nevykazuje protichodný moment; ak s=1 - režim skratu, v ktorom rotor motora stojí (n 2 = 0). Sklz závisí od mechanického zaťaženia hriadeľa motora a zvyšuje sa s jeho rastom. Sklz zodpovedajúci menovitému zaťaženiu motora sa nazýva menovitý sklz. Pre asynchrónne motory malého a stredného výkonu sa menovitý sklz pohybuje od 8 % do 2 %. Ovládanie orientované na pole umožňuje plynulo a presne riadiť parametre pohybu (otáčky a krútiaci moment), no zároveň si jeho realizácia vyžaduje informácie o smere a vektore väzby toku rotora motora. Pre zvýšenie účinnosti a zníženie opotrebovania kief obsahujú niektoré ADFR špeciálne zariadenie (skratový mechanizmus), ktoré po naštartovaní zdvihne kefky a uzavrie krúžky. Pri reostatickom štartovaní sa dosahujú priaznivé štartovacie charakteristiky, pretože vysoké hodnoty krútiaceho momentu sa dosahujú pri nízkych hodnotách štartovacích prúdov. V súčasnosti sú ADFR nahradené kombináciou asynchrónneho elektromotora s rotorom nakrátko a frekvenčným meničom.![]() ,
,Premena energie
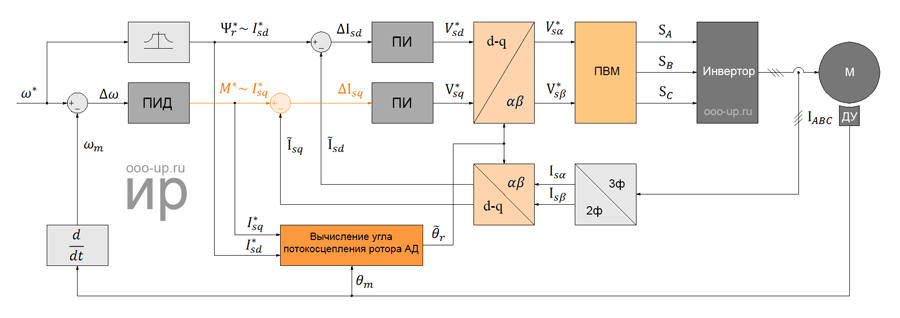 Pole orientované riadenie asynchrónneho elektromotora snímačom polohy rotora
Pole orientované riadenie asynchrónneho elektromotora snímačom polohy rotora Podľa spôsobu získavania informácií o polohe prietokovej väzby rotora elektromotora sa rozlišujú:
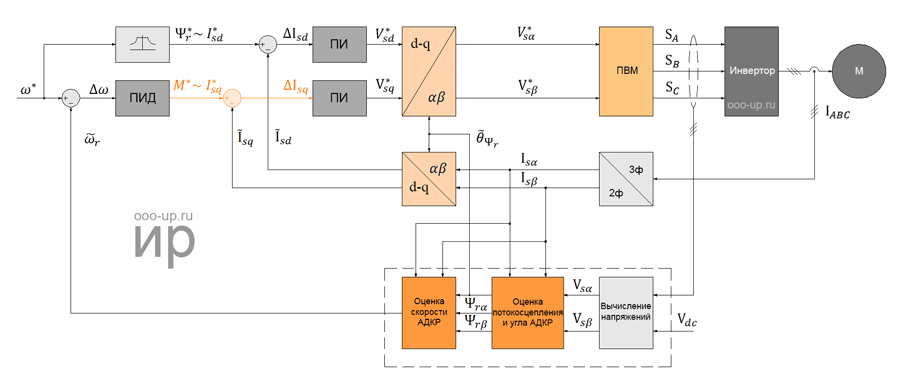 Pole orientované riadenie asynchrónneho motora bez snímača polohy rotora
Pole orientované riadenie asynchrónneho motora bez snímača polohy rotora