Що таке шим контролер, як він влаштований та працює, види та схеми
Раніше для живлення пристроїв використовували схему з понижувальним (або підвищуючим або багатообмотувальним) трансформатором, діодним мостом, фільтром для згладжування пульсацій. Для стабілізації використовувалися лінійні схеми параметричних або інтегральних стабілізаторах. Головним недоліком був низький ККД та велика вага та габарити потужних блоків живлення.
У всіх сучасних побутових електроприладах використовуються імпульсні блоки живлення (ДБЖ, ІДП - одне й те саме). У більшості таких блоків живлення як основний керуючий елемент використовують ШІМ-контролер. У цій статті ми розглянемо його пристрій та призначення.
Визначення та основні переваги
ШИМ-контролер - це пристрій, що містить у собі ряд схемотехнічних рішень для керування силовими ключами. При цьому керування відбувається на підставі інформації, отриманої по ланцюгах зворотного зв'язку по струму або напруги - це потрібно для стабілізації вихідних параметрів.
Іноді ШІМ-контролерами називаються генератори ШІМ-імпульсів, але в них немає можливості підключити ланцюги зворотного зв'язку, і вони підходять швидше для регуляторів напруги, ніж для забезпечення стабільного живлення приладів. Однак у літературі та інтернет-порталах часто можна зустріти назви типу «ШИМ-контролер, на NE555» або «…на ардуїно» - це не зовсім вірно з вищевказаних причин, вони можуть використовуватися тільки для регулювання вихідних параметрів, але не для їхньої стабілізації.
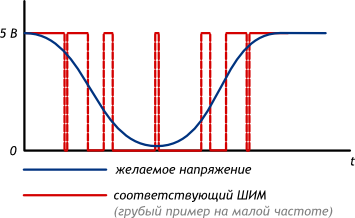
Абревіатура «ШИМ» розшифровується, як широтно-імпульсна модуляція - це один із методів модуляції сигналу не за рахунок величини вихідної напруги, а саме за рахунок зміни ширини імпульсів. В результаті формується сигнал, що моделюється за рахунок інтегрування імпульсів за допомогою C-або LC-ланцюгів, іншими словами - за рахунок згладжування.
Висновок: ШІМ-контролер – пристрій, який керує ШІМ-сигналом.
Основні характеристики
Для ШІМ-сигналу можна виділити дві основні характеристики:
1. Частота імпульсів – від цього залежить робоча частота перетворювача. Типовими є частоти вище 20 кгц, фактично 40-100 кгц.
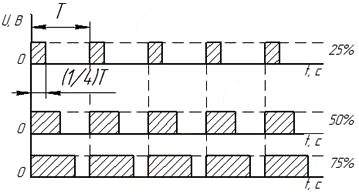
2. Коефіцієнт заповнення та шпаруватість. Це дві суміжні величини, що характеризують те саме. Коефіцієнт заповнення може позначатися буквою S, а шпаруватість D.
де T - це період сигналу,
Частина часу від періоду, коли на виході контролера формується керуючий сигнал, завжди менше 1. Добре завжди більше 1. При частоті 100 кГц період сигналу дорівнює 10 мкс, а ключ відкритий на протязі 2.5 мкс, то коефіцієнт заповнення - 0.25, у відсотках - 25 %, а шпаруватість дорівнює 4.
Також важливо враховувати внутрішню конструкцію та призначення за кількістю керованих ключів.
Відмінності від лінійних схем втрати
Як було зазначено, перевагою перед лінійними схемами є високий ККД (більше 80, а нині і 90%). Це зумовлено наступним:
Допустимо згладжена напруга після діодного мосту дорівнює 15В, струм навантаження 1А. Вам потрібно отримати стабілізоване напругою 12В. Фактично лінійний стабілізатор є опір, який змінює свою величину в залежності від величини вхідної напруги для отримання номінального вихідного - з невеликими відхиленнями (частки вольт) при змінах вхідного (одиниці і десятки вольт).
На резисторах, як відомо, при перебігу через них електричного струму виділяється теплова енергія. На лінійних стабілізаторах відбувається такий самий процес. Виділена потужність дорівнюватиме:
Pвтрат = (Uвх-Uвых) * I
Так як у розглянутому прикладі струм навантаження 1А, вхідна напруга 15В, а вихідна - 12В, то розрахуємо втрати і ККД лінійного стабілізатора (КРЕНКА або типу L7812):
Pвтрат = (15В-12В) * 1А = 3В * 1А = 3Вт
Тоді ККД дорівнює:
n=Корисна/Рпотр
n=((12В*1А)/(15В*1А))*100%=(12Вт/15Вт)*100%=80%
Основною особливістю ШІМ є те, що силовий елемент, нехай це буде MOSFET, або повністю відкритий, або повністю закритий і струм через нього не протікає. Тому втрати ККД обумовлені лише втратами провідності.
І втратами перемикання. Це тема для окремої статті, тому не зупинятимемося на цьому питанні. Також втрати блоку живлення виникають (вхідних та вихідних, якщо блок живлення мережевий), а також на провідниках, пасивних елементах фільтра тощо.
Загальна структура
Розглянемо загальну структуру абстрактного ШІМ-контролера. Я вжив слово "абстрактного" тому, що, загалом, всі вони схожі, але їх функціонал все ж таки може відрізнятися в певних межах, відповідно відрізнятиметься структура та висновки.
Усередині ШІМ-контролера, як і в будь-якій іншій ІМС, знаходиться напівпровідниковий кристал, на якому розташована складна схема. До складу контролера входять такі функціональні вузли:
1. Генератор імпульсів.
2. Джерело опорної напруги. (ІОН)
3. Ланцюги для обробки сигналу зворотного зв'язку (ОС): компаратор підсилювач помилки.
4. Генератор імпульсів керує вбудованими транзисторами, які призначені для керування силовим ключем чи ключами.
Кількість силових ключів, якими може керувати ШІМ-контролер залежить від його призначення. Найпростіші зворотноходові перетворювачі у своїй схемі містять 1 силовий ключ, напівмостові схеми (push-pull) – 2 ключі, мостові – 4.
Від типу ключа залежить вибір ШИМ-контролера. Для управління біполярним транзистором основною вимогою є, щоб вихідний струм управління ШІМ-контролера не був нижчим, ніж струм транзистора ділений на H21е, щоб його включати і відключати досить просто подавати імпульси на базу. У цьому випадку підійде більшість контролерів.
У разі керування є певні нюанси. Для швидкого вимкнення потрібно розрядити ємність затвора. Для цього вихідний ланцюг затвора виконують з двох ключів - один з них з'єднаний з джерелом живлення з виведенням ІМС і управляє затвором (включає транзистор), а другий встановлений між виходом та землею, коли потрібно відключити силовий транзистор - перший ключ закривається, другий відкривається, замикаючи затвор на землю і розряджає його.
Цікаво:
У деяких ШІМ-контролерах для малопотужних блоків живлення (до 50 Вт) силові ключі вбудовані та зовнішні не використовуються. Приклад - 5l0830R
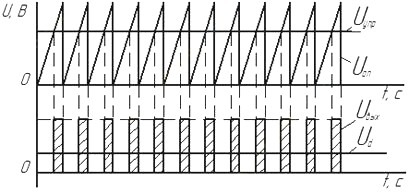
Якщо говорити узагальнено, то ШІМ-контролер можна подати у вигляді компаратора, на один вхід якого подано сигнал з ланцюга зворотного зв'язку (ОС), а на другий вхід пилкоподібний сигнал, що змінюється. Коли пилкоподібний сигнал досягає і перевищує за величиною сигнал ОС, то на виході компаратора виникає імпульс.
При зміні сигналів на входах ширина імпульсів змінюється. Припустимо, що ви підключили потужний споживач до блоку живлення, і на його виході напруга просіла, тоді напруга ОС також впаде. Тоді в більшій частині періоду спостерігатиметься перевищення пилкоподібного сигналу над сигналом ОС, і ширина імпульсів збільшиться. Все вищесказане певною мірою відбито на графіках.
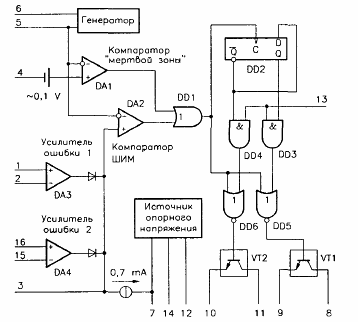
Функціональна схема ШІМ-контролера на прикладі TL494, ми розглянемо його пізніше. Призначення висновків та окремих вузлів описано у наступному підзаголовку.
Призначення висновків
ШИМ-контролери випускаються у різних корпусах. Висновків у них може бути від трьох до 16 і більше. Відповідно кількості висновків, а вірніше їх призначення залежить гнучкість використання контролера. Наприклад, у популярній мікросхемі - найчастіше 8 висновків, а ще більш культової - TL494- 16 чи 24.
Тому розглянемо типові назви висновків та їх призначення:
GND- загальний висновок з'єднується з мінусом схеми чи із землею.
Uc (Vc)- Харчування мікросхеми.
Ucc (Vss, Vcc)- Висновок контролю живлення. Якщо харчування просідає, виникає ймовірність того, що силові ключі не будуть повністю відкриватися, а через це почнуть грітися і згорять. Висновок потрібен щоб вимкнути контролер у подібній ситуації.
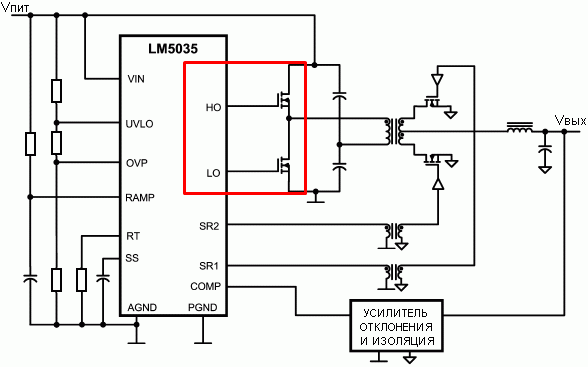
OUT- як видно з назви - це вихід контролера. Тут виводяться керуючий ШІМ-сигнал для силових ключів. Вище ми згадали, що у перетворювачах різних топологій мають різну кількість ключів. Назва висновку може відрізнятися залежно від цього. Наприклад, у контролерах для напівмостових схем він може називатися HO та LO для верхнього та нижнього ключа відповідно. При цьому і вихід може бути однотактним і двотактним (з одним ключем і двома) - для керування польовими транзисторами (пояснення див. вище). Але і сам контролер може бути для однотактної та двотактної схеми - з одним і двома вихідними висновками відповідно. Це важливо.
Vref- опорна напруга, що зазвичай з'єднується із землею через невеликий конденсатор (одиниці мікрофарад).
ILIM- сигнал із датчика струму. Потрібен обмеження вихідного струму. Поєднується з ланцюгами зворотного зв'язку.
ILIMREF- на ній встановлюється напруга спрацьовування ніжки ILIM
SS- Формується сигнал для м'якого старту контролера. Призначений для плавного виходу номінальний режим. Між нею та загальним дротом для забезпечення плавного пуску встановлюють конденсатор.
RtCt- висновки для підключення RC-ланцюга, що час задає, яка визначає частоту ШІМ-сигналу.
CLOCK- тактові імпульси для синхронізації декількох ШІМ-контролерів між собою тоді RC-ланцюг підключається тільки до провідного контролера, а RT ведених з Vref, CT ведених з'єднуюся із загальним.
RAMP- Це введення порівняння. На нього подають пилкоподібну напругу, наприклад з виведення Ct, Коли вона перевищує значення напруга на виході посилення помилки, то на OUT з'являється відключаючий імпульс - основа для ШІМ-регулювання.
INV та NONINV- це інвертуючий та неінвертуючий входи компаратора, на якому побудований підсилювач помилки. Простими словами: що більше напрузі на INV - то довше вихідні імпульси і навпаки. До нього підключається сигнал із дільника напруги в ланцюзі зворотного зв'язку з виходу. Тоді неінвертуючий вхід NONINV підключають до загального дроту – GND.
EAOUT або Error Amplifier Outputрусявий. Вихід підсилювача помилки. Незважаючи на те, що є входи підсилювача помилки і за їх допомогою, в принципі можна регулювати вихідні параметри, але контролер досить повільно на це реагує. В результаті повільної реакції може виникнути збудження схеми і вона вийде з ладу. Тому цього висновку через частотозависимые ланцюга подають сигнали на INV. Це ще називається частотною корекцією підсилювача помилки.
Приклади реальних пристроїв
Для закріплення інформації розглянемо кілька прикладів типових ШІМ-контролерів та їх схем включення. Ми робитимемо це на прикладі двох мікросхем:
TL494 (її аналоги: KA7500B, КР1114ЕУ4, Sharp IR3M02, UA494, Fujitsu MB3759);
Вони активно використовуються. До речі, ці блоки живлення мають чималу потужність (100 Вт і більше по 12В шині). Часто використовуються як донор для переробки під лабораторний блок живлення або потужний потужний зарядний пристрій, наприклад для автомобільних акумуляторів.
TL494 - огляд
Почнемо з 494 мікросхеми. Її технічні характеристики:
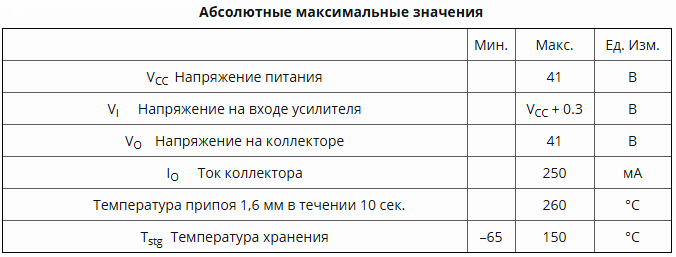
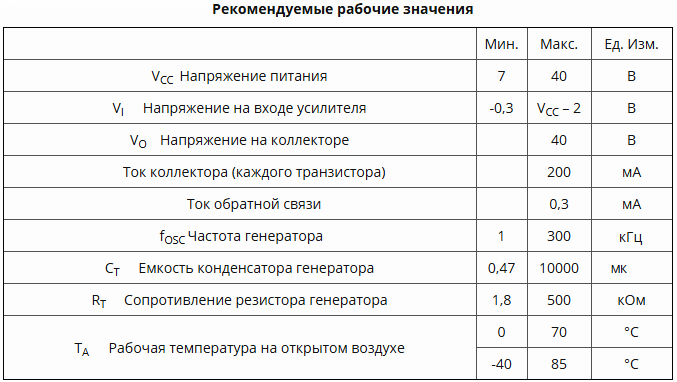
У цьому конкретному прикладі можна побачити більшість описаних вище висновків:
1. Неінвертуючий вхід першого компаратора помилки
2. Інвертуючий вхід першого компаратора помилки
3. Вхід зворотного зв'язку
4. Вхід регулювання мертвого часу
5. Висновок для підключення зовнішнього конденсатора, що задає.
6. Висновок для підключення резистора, що задає час.
7. Загальне виведення мікросхеми, мінус харчування
8. Виведення колектора першого вихідного транзистора
9. Виведення емітера першого вихідного транзистора
10. Виведення емітера другого вихідного транзистора
11. Виведення колектора другого вихідного транзистора
12. Вхід подачі напруги живлення
13. Вхід вибору однотактного або двотактного режиму роботи мікросхеми
14. Виведення вбудованого джерела опорної напруги 5 вольт
15. Інвертуючий вхід другого компаратора помилки
16. Неінвертуючий вхід другого компаратора помилки
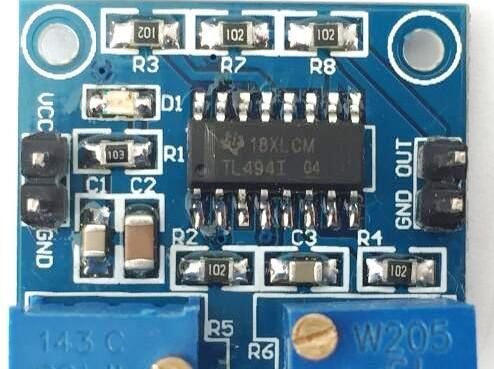
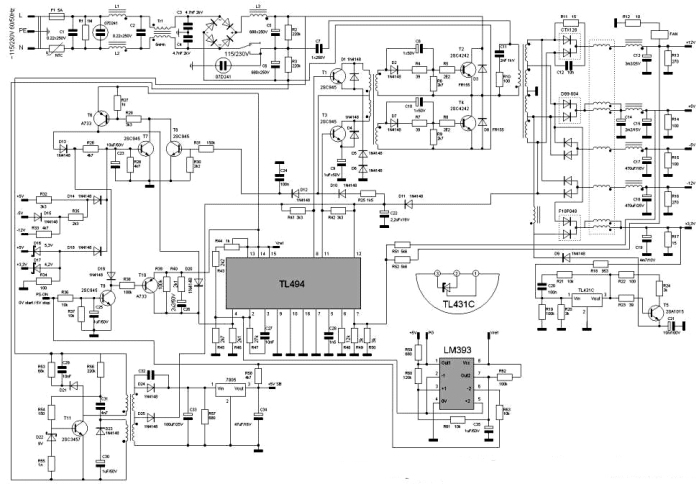
На малюнку нижче показано приклад комп'ютерного блоку живлення на цій мікросхемі.
UC3843 - огляд
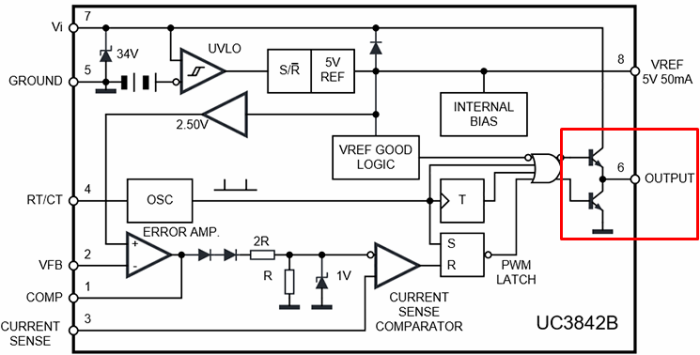
Іншою популярною ШІМ є мікросхема 3843 – на ній також будуються комп'ютерні та не тільки блоки живлення. Її цоколівка розташована нижче, як ви можете спостерігати, має всього 8 висновків, але функції вона виконує ті ж, що і попередня ІМС.
Цікаво:
Буває UC3843 і в 14-ногом корпусі, але зустрічаються набагато рідше. Зверніть увагу на маркування - додаткові висновки дублюються або незадіяні (NC).
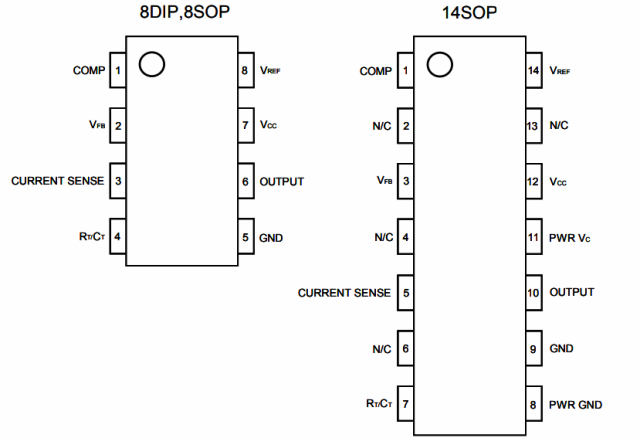
Розшифруємо призначення висновків:
1. Вхід компаратора (підсилювача помилки).
2. Вхід напруги зворотний зв'язок. Ця напруга порівнюється з опорним усередині ІМС.
3. Датчик струму. Підключається до резистори стоїть між силовим транзистором і загальним проводом. Потрібен захист від перевантажень.
4. Часовий RC-ланцюг. З її допомогою задається робоча частота ІМС.
6. Вихід. Керуюча напруга. Підключається до затвора транзистора, тут двотактний вихідний каскад для керування однотактним перетворювачем (одним транзистором), що можна спостерігати нижче.
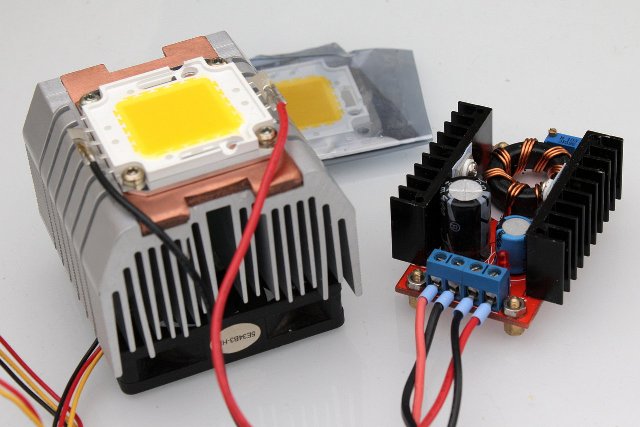
Понижуючого (Buck), підвищуючого (Boost) та понижуючого-підвищуючого (Buck-Boost) типів.
Мабуть, одним із найбільш вдалих прикладів буде поширена мікросхема LM2596, на базі якого на ринку можна знайти масу таких перетворювачів, як зображено нижче.
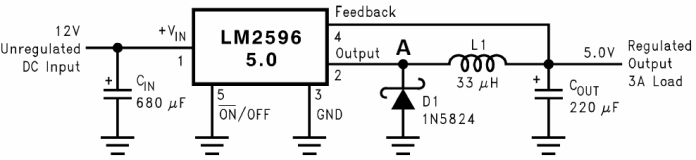
Така мікросхема містить у собі вищеописані технічні рішення, і навіть замість вихідного каскаду на малопотужних ключах у ній вбудований силовий ключ, здатний витримати струм до 3А. Нижче зображено внутрішню структуру такого перетворювача.
Можна переконатися, що, по суті, особливих відмінностей від розглянутих у ній немає.
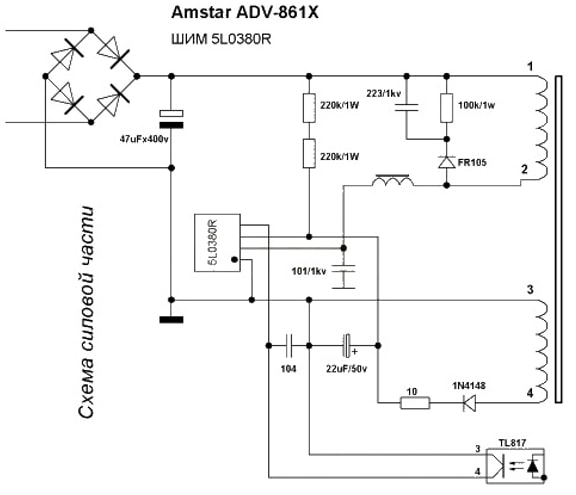
А ось приклад на подібному контролері, як бачите силового ключа, немає, а тільки мікросхема 5L0380R з чотирма висновками. Звідси випливає, що у певних завданнях складна схемотехніка та гнучкість TL494 просто не потрібна. Це справедливо для малопотужних блоків живлення, де немає особливих вимог до шумів та перешкод, а вихідні пульсації можна погасити LC-фільтром. Це блок живлення для світлодіодних стрічок, ноутбуків, DVD-плеєрів та інше.
Висновок
На початку статті було сказано про те, що ШІМ-контролер це пристрій, який моделює середнє значення напруги за рахунок зміни ширини імпульсів на підставі сигналу з ланцюга зворотного зв'язку. Зазначу, що назви та класифікація у кожного автора часто відрізняються, іноді ШІМ-контролером називають простий ШІМ-регулятор напруги, а описане в цій статті сімейство електронних мікросхем називають «Інтегральна підсистема для імпульсних стабілізованих перетворювачів». Від назви суть не змінюється, але виникають суперечки та непорозуміння.