Trifazni asinhroni motor
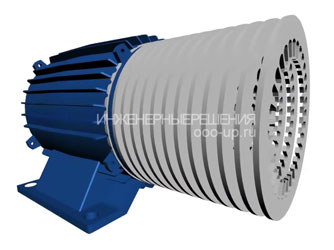
Sestavljen je iz dveh glavnih delov - statorja in rotorja. Stator je fiksni del, rotor pa vrtljivi del. Rotor je nameščen znotraj statorja. Med rotorjem in statorjem je majhna razdalja, imenovana zračna reža, običajno 0,5-2 mm.
Stator indukcijskega motorja
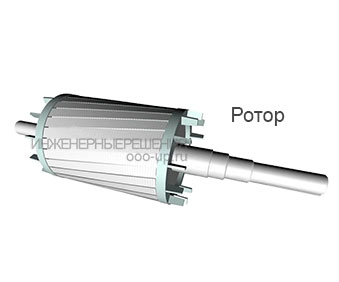 Rotor indukcijskega motorja
Rotor indukcijskega motorja
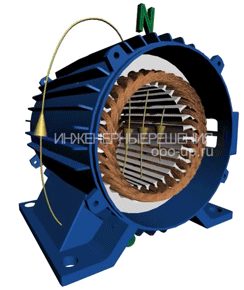
stator sestoji iz telesa in jedra z navitjem. Jedro statorja je sestavljeno iz tanke pločevine tehničnega jekla, običajno debeline 0,5 mm, prevlečeno z izolacijskim lakom. Laminirana zasnova jedra prispeva k znatnemu zmanjšanju vrtinčnih tokov, ki nastanejo med postopkom remagnetizacije jedra z vrtljivim magnetnim poljem. Navitja statorja se nahajajo v utorih jedra.
 Ohišje in jedro statorja asinhronskega elektromotorja
Ohišje in jedro statorja asinhronskega elektromotorja
 Zasnova laminiranega jedra asinhronskega motorja
Zasnova laminiranega jedra asinhronskega motorja
Rotor sestoji iz jedra s kratkostičnim navitjem in gredi. Tudi jedro rotorja je laminirano. Hkrati plošče rotorja niso lakirane, saj ima tok nizko frekvenco in oksidni film zadostuje za omejevanje vrtinčnih tokov.
Načelo delovanja. Rotirajoče magnetno polje
Načelo delovanja trifaznega navitja temelji na zmožnosti trifaznega navitja, ko je priključen na trifazno tokovno omrežje, da ustvari vrtljivo magnetno polje.
Teči
Stop
Rotacijsko magnetno polje indukcijskega motorja
Vrtilna frekvenca tega polja ali sinhrona vrtilna frekvenca je neposredno sorazmerna s frekvenco izmeničnega toka f 1 in obratno sorazmerna s številom parov polov p trifaznega navitja.
 ,
,
- kjer je n 1 frekvenca vrtenja magnetnega polja statorja, rpm,
- f 1 - frekvenca izmeničnega toka, Hz,
- p je število parov polov
Koncept rotacijskega magnetnega polja
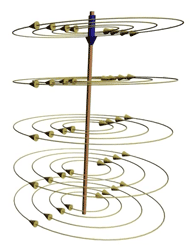
Da bi bolje razumeli pojav rotirajočega magnetnega polja, razmislite o poenostavljenem trifaznem navitju s tremi obrati. Tok, ki teče skozi prevodnik, ustvari okoli njega magnetno polje. Spodnja slika prikazuje polje, ki ga ustvari trifazni izmenični tok v določenem trenutku.
Teči
Stop
Magnetno polje enosmernega prevodnika z enosmernim tokom
 Magnetno polje, ki ga ustvari navitje
Magnetno polje, ki ga ustvari navitje
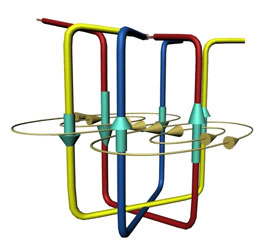
Komponente AC se bodo sčasoma spreminjale, kar bo povzročilo spremembo magnetnega polja, ki ga ustvarjajo. V tem primeru bo nastalo magnetno polje trifaznega navitja prevzelo drugačno usmeritev, hkrati pa ohranilo enako amplitudo.
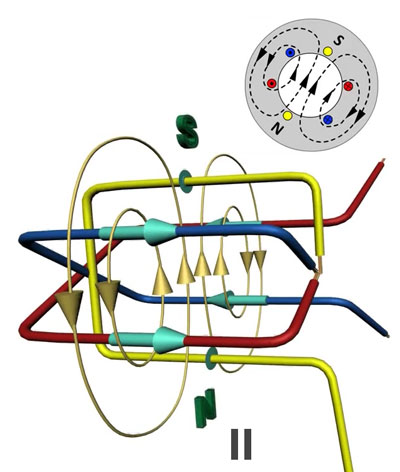
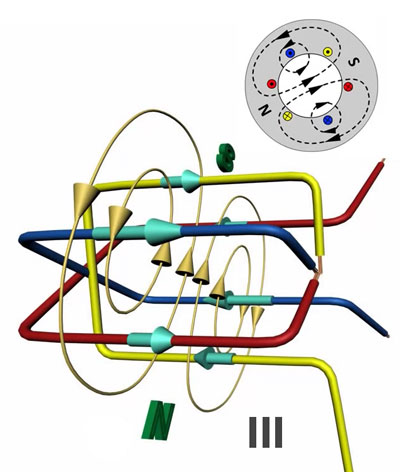
Magnetno polje, ki ga ustvari trifazni tok v različnih časih 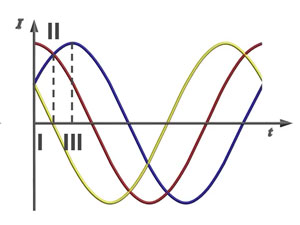 Tok, ki teče v zavojih elektromotorja (premik 60°)
Tok, ki teče v zavojih elektromotorja (premik 60°)
Teči
Stop
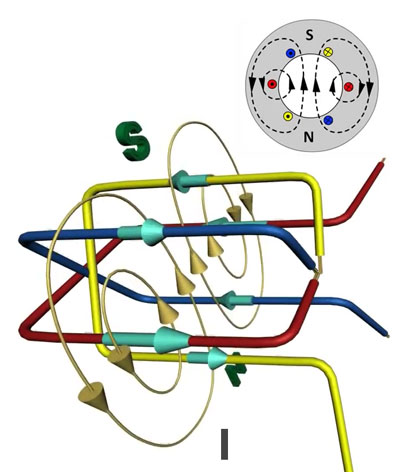
Delovanje rotacijskega magnetnega polja na zaprto zanko
Zdaj pa postavimo zaprt prevodnik v vrteče se magnetno polje. S spremembo magnetnega polja se bo v prevodniku pojavila elektromotorna sila (EMS). Po drugi strani bo EMF povzročil tok v prevodniku. Tako bo v magnetnem polju zaprt vodnik s tokom, na katerega bo delovala sila, po kateri se bo vezje začelo vrteti.
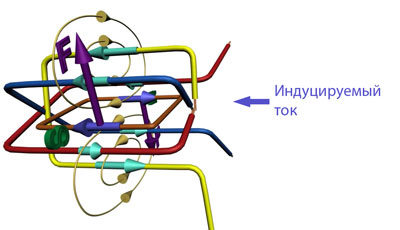 Vpliv rotacijskega magnetnega polja na zaprt vodnik s tokom
Vpliv rotacijskega magnetnega polja na zaprt vodnik s tokom Indukcijski motor z veveričjim rotorjem
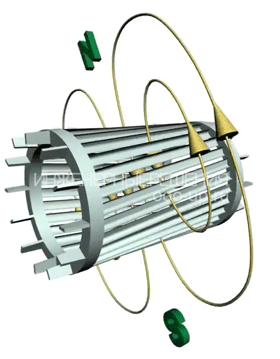
Tudi ta princip deluje. Namesto okvirja s tokom znotraj asinhronskega motorja je rotor z veverico, ki po zasnovi spominja na veveričje kolo. Rotor z veverico je sestavljen iz palic, ki so na koncih kratko povezane z obroči.
 Rotor z veveričjo kletko, ki se najpogosteje uporablja v indukcijskih motorjih (prikazan brez gredi in jedra)
Rotor z veveričjo kletko, ki se najpogosteje uporablja v indukcijskih motorjih (prikazan brez gredi in jedra) Trifazni izmenični tok, ki poteka skozi navitja statorja, ustvarja vrtljivo magnetno polje. Tako bo, kot je bilo že opisano, v palicah rotorja induciran tok, zaradi česar se bo rotor začel vrteti. Na spodnji sliki lahko vidite razliko med induciranimi tokovi v palicah. To je posledica dejstva, da se velikost spremembe magnetnega polja razlikuje v različnih parih palic zaradi njihove različne lokacije glede na polje. Sprememba toka v palicah se s časom spreminja.
Teči
Stop
Vrtljivo magnetno polje prodira skozi rotor z veveričjo kletko
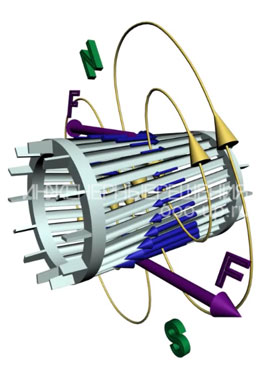
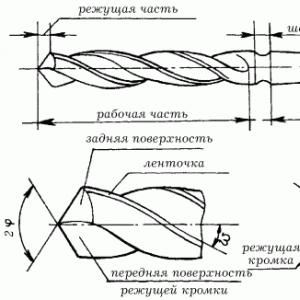
Morda boste tudi opazili, da so palice rotorja nagnjene glede na os vrtenja. To se naredi, da se zmanjšajo višji harmoniki EMF in se znebijo trenutnega valovanja. Če bi bile palice usmerjene vzdolž osi vrtenja, bi v njih nastalo pulzirajoče magnetno polje zaradi dejstva, da je magnetni upor navitja veliko večji od magnetnega upora zob statorja.
Slip indukcijski motor. Hitrost rotorja
Posebnost indukcijskega motorja je, da je hitrost rotorja n 2 manjša od sinhrone hitrosti magnetnega polja statorja n 1 .
To je razloženo z dejstvom, da se EMF v palicah navitja rotorja inducira le, če so frekvence vrtenja neenake n 2 Razmislite o primeru, ko bo hitrost rotorja sovpadala s frekvenco vrtenja magnetnega polja statorja. V tem primeru bo relativno magnetno polje rotorja konstantno, zato v palicah rotorja ne bo ustvarjeno EMF in s tem tudi tok. To pomeni, da bo sila, ki deluje na rotor, enaka nič. Tako se bo rotor upočasnil. Po tem bo izmenično magnetno polje ponovno delovalo na palice rotorja, s čimer se bo inducirani tok in sila povečala. V resnici rotor ne bo nikoli dosegel hitrosti vrtenja magnetnega polja statorja. Rotor se bo vrtel z neko hitrostjo, ki je nekoliko manjša od sinhrone hitrosti. Zdrs indukcijskega motorja se lahko spreminja od 0 do 1, to je 0-100%. Če je s ~ 0, potem to ustreza načinu prostega teka, ko rotor motorja praktično ne doživi nasprotnega momenta; če je s=1 - način kratkega stika, v katerem rotor motorja miruje (n 2 = 0). Zdrs je odvisen od mehanske obremenitve gredi motorja in narašča z njeno rastjo. Zdrs, ki ustreza nazivni obremenitvi motorja, se imenuje nazivni zdrs. Pri asinhronih motorjih majhne in srednje moči se nazivni zdrs giblje od 8% do 2%. Polje usmerjen nadzor vam omogoča nemoteno in natančno krmiljenje parametrov gibanja (hitrost in navor), hkrati pa njegova izvedba zahteva informacije o smeri in vektorju povezave pretoka rotorja motorja. Za povečanje učinkovitosti in zmanjšanje obrabe krtač nekateri ADFR vsebujejo posebno napravo (kratkostični mehanizem), ki po zagonu dvigne krtače in zapre obroče. Z reostatskim zagonom se dosežejo ugodne zagonske lastnosti, saj se pri nizkih vrednostih zagonskih tokov dosežejo visoke vrednosti navora. Trenutno ADFR nadomešča kombinacija asinhronega elektromotorja z rotorjem s kletko in frekvenčnim pretvornikom.![]() ,
,Pretvorba energije
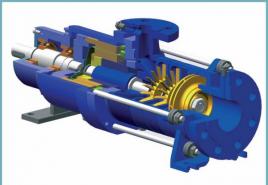
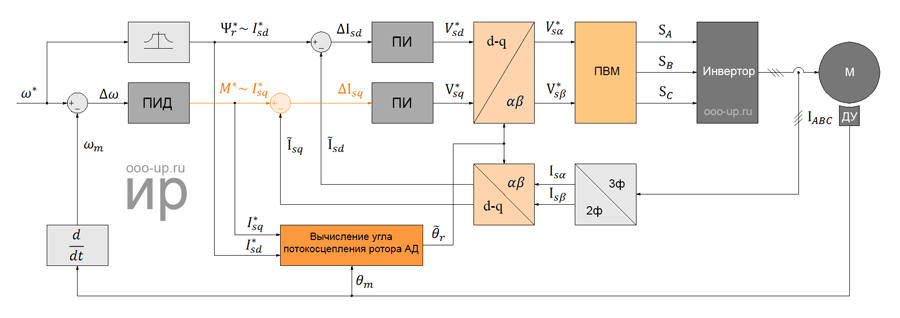 Polje usmerjeno krmiljenje asinhronega elektromotorja s senzorjem položaja rotorja
Polje usmerjeno krmiljenje asinhronega elektromotorja s senzorjem položaja rotorja Glede na način pridobivanja informacij o položaju pretočne povezave rotorja elektromotorja ločimo naslednje:
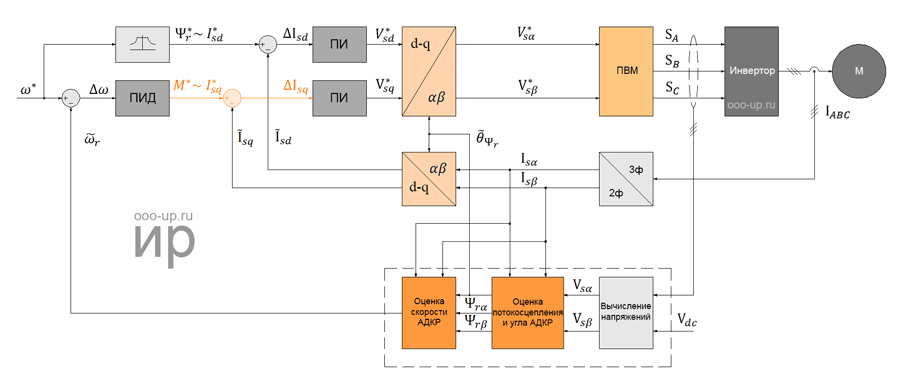 Polje usmerjeno krmiljenje asinhronega motorja brez senzorja položaja rotorja
Polje usmerjeno krmiljenje asinhronega motorja brez senzorja položaja rotorja