Trīsfāzu asinhronais motors
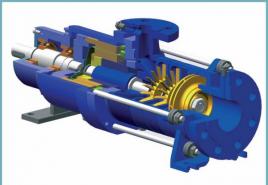
Tas sastāv no divām galvenajām daļām - statora un rotora. Stators ir fiksētā daļa, rotors ir rotējošā daļa. Rotors ir novietots statora iekšpusē. Starp rotoru un statoru ir neliels attālums, ko sauc par gaisa spraugu, parasti 0,5-2 mm.
Indukcijas motora stators
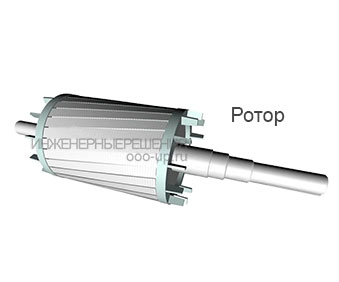 Indukcijas motora rotors
Indukcijas motora rotors
stators sastāv no korpusa un serdes ar tinumu. Statora serde ir montēta no plānas loksnes tehniskā tērauda, parasti 0,5 mm bieza, pārklāta ar izolācijas laku. Kodola laminētais dizains veicina ievērojamu virpuļstrāvu samazināšanos, kas rodas kodola remagnetizēšanas procesā ar rotējošu magnētisko lauku. Statora tinumi atrodas serdes rievās.
 Asinhronā elektromotora korpuss un statora serde
Asinhronā elektromotora korpuss un statora serde
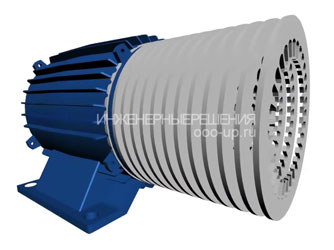 Asinhronā motora laminētā serdeņa dizains
Asinhronā motora laminētā serdeņa dizains
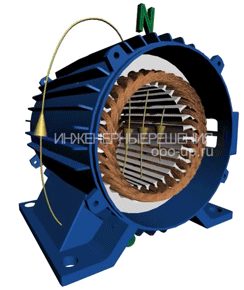
Rotors sastāv no serdes ar īsslēgtu tinumu un vārpstas. Rotora serdenim ir arī laminēta konstrukcija. Tajā pašā laikā rotora loksnes nav lakotas, jo strāvai ir zema frekvence un oksīda plēve ir pietiekama, lai ierobežotu virpuļstrāvas.
Darbības princips. Rotējošais magnētiskais lauks
Trīsfāzu tinuma darbības princips ir balstīts uz trīsfāzu tinuma spēju, savienojot ar trīsfāzu strāvas tīklu, radīt rotējošu magnētisko lauku.
Skrien
Stop
Asinhronā motora rotējošs magnētiskais lauks
Šī lauka rotācijas frekvence jeb sinhronās rotācijas frekvence ir tieši proporcionāla maiņstrāvas frekvencei f 1 un apgriezti proporcionāla trīsfāzu tinuma polu pāru skaitam p.
 ,
,
- kur n 1 ir statora magnētiskā lauka rotācijas frekvence, apgr./min,
- f 1 — maiņstrāvas frekvence, Hz,
- p ir stabu pāru skaits
Rotējoša magnētiskā lauka koncepcija
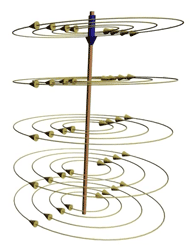
Lai labāk izprastu rotējošā magnētiskā lauka fenomenu, apsveriet vienkāršotu trīsfāzu tinumu ar trim pagriezieniem. Strāva, kas plūst caur vadītāju, rada ap to magnētisko lauku. Zemāk redzamajā attēlā parādīts lauks, ko noteiktā laika brīdī rada trīsfāzu maiņstrāva.
Skrien
Stop
Tiešā vadītāja magnētiskais lauks ar līdzstrāvu
 Magnētiskais lauks, ko rada tinums
Magnētiskais lauks, ko rada tinums
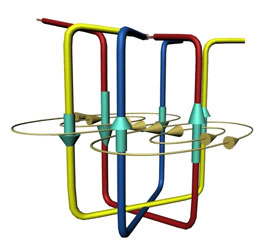
Maiņstrāvas komponenti laika gaitā mainīsies, kā rezultātā mainīsies to radītais magnētiskais lauks. Šajā gadījumā iegūtais trīsfāzu tinuma magnētiskais lauks iegūs atšķirīgu orientāciju, vienlaikus saglabājot to pašu amplitūdu.
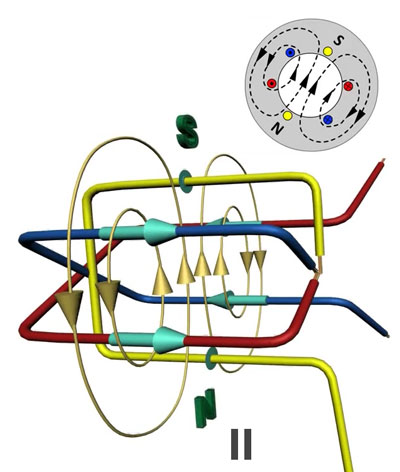
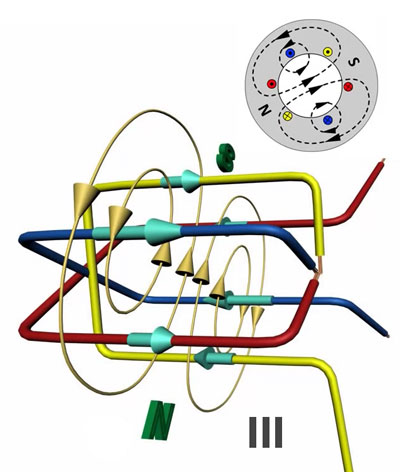
Magnētiskais lauks, ko dažādos laikos rada trīsfāzu strāva 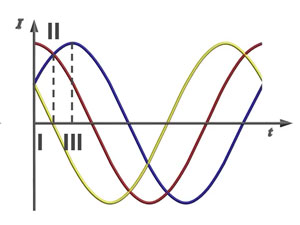 Strāva, kas plūst elektromotora pagriezienos (nobīde 60°)
Strāva, kas plūst elektromotora pagriezienos (nobīde 60°)
Skrien
Stop
Rotējoša magnētiskā lauka darbība slēgtā cilpā
Tagad ievietosim slēgtu vadītāju rotējošā magnētiskā lauka iekšpusē. Magnētiskā lauka maiņa novedīs pie elektromotora spēka (EMF) rašanās vadītājā. Savukārt EMF radīs strāvu vadītājā. Tādējādi magnētiskajā laukā būs slēgts vadītājs ar strāvu, uz kura darbosies spēks, saskaņā ar kuru ķēde sāks griezties.
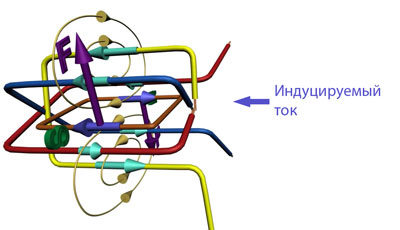 Rotējoša magnētiskā lauka ietekme uz slēgtu vadītāju ar strāvu
Rotējoša magnētiskā lauka ietekme uz slēgtu vadītāju ar strāvu Vāveres būra rotoru asinhronais motors
Šis princips arī darbojas. Rāmja vietā ar strāvu asinhronajā motorā ir vāveres rotors, kas pēc konstrukcijas atgādina vāveres riteni. Vāveres būra rotors sastāv no stieņiem, kuru galos ir īssavienojums ar gredzeniem.
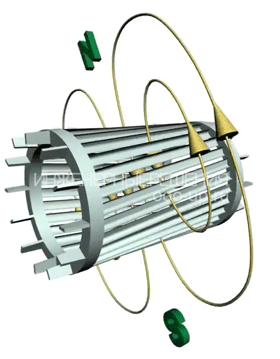
 Asinhronajos motoros visbiežāk izmantotais vāveres sprosts vāveres būra rotors (parādīts bez vārpstas un serdes)
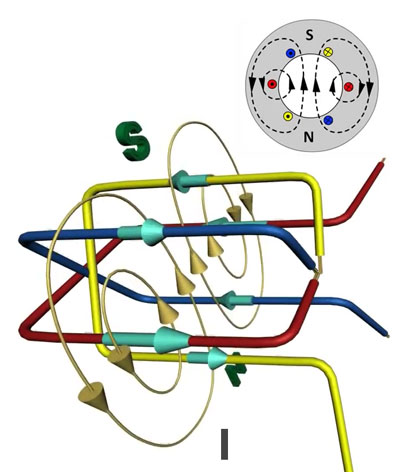
Asinhronajos motoros visbiežāk izmantotais vāveres sprosts vāveres būra rotors (parādīts bez vārpstas un serdes) Trīsfāzu maiņstrāva, kas iet caur statora tinumiem, rada rotējošu magnētisko lauku. Tādējādi, kā aprakstīts iepriekš, rotora stieņos tiks inducēta strāva, kā rezultātā rotors sāks griezties. Zemāk esošajā attēlā var redzēt atšķirību starp inducētajām strāvām stieņos. Tas ir saistīts ar faktu, ka magnētiskā lauka izmaiņu lielums atšķiras dažādos stieņu pāros, ņemot vērā to atšķirīgo atrašanās vietu attiecībā pret lauku. Strāvas izmaiņas stieņos laika gaitā mainīsies.
Skrien
Stop
Rotējošais magnētiskais lauks, kas iekļūst vāveres būra rotoru
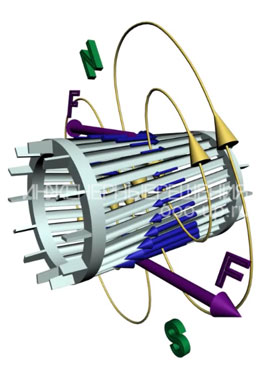
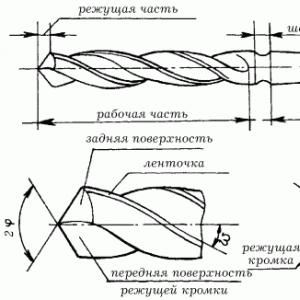
Varat arī pamanīt, ka rotora stieņi ir sasvērušies attiecībā pret griešanās asi. Tas tiek darīts, lai samazinātu EML augstākās harmonikas un atbrīvotos no momenta pulsācijas. Ja stieņi būtu vērsti pa griešanās asi, tad tajos rastos pulsējošs magnētiskais lauks, jo tinuma magnētiskā pretestība ir daudz augstāka par statora zobu magnētisko pretestību.
Slīdes asinhronais motors. Rotora ātrums
Asinhronā motora īpatnība ir tāda, ka rotora ātrums n 2 ir mazāks par statora magnētiskā lauka sinhrono ātrumu n 1 .
Tas izskaidrojams ar to, ka EML rotora tinuma stieņos tiek inducēts tikai tad, ja rotācijas frekvences ir nevienādas n 2 Apsveriet gadījumu, kad rotora ātrums sakritīs ar statora magnētiskā lauka griešanās biežumu. Šajā gadījumā rotora relatīvais magnētiskais lauks būs nemainīgs, tāpēc rotora stieņos neveidosies EML un līdz ar to arī strāva. Tas nozīmē, ka spēks, kas iedarbojas uz rotoru, būs nulle. Tādējādi rotors palēnināsies. Pēc tam uz rotora stieņiem atkal iedarbosies mainīgs magnētiskais lauks, tādējādi palielināsies inducētā strāva un spēks. Patiesībā rotors nekad nesasniegs statora magnētiskā lauka rotācijas ātrumu. Rotors griezīsies ar noteiktu ātrumu, kas ir nedaudz mazāks par sinhrono ātrumu. Asinhronā motora slīdēšana var mainīties no 0 līdz 1, t.i., 0-100%. Ja s~0, tad tas atbilst tukšgaitas režīmam, kad motora rotors praktiski nepiedzīvo pretdarbības momentu; ja s=1 - īssavienojuma režīms, kurā motora rotors nekustas (n 2 = 0). Slīdēšana ir atkarīga no mehāniskās slodzes uz motora vārpstu un palielinās līdz ar tās augšanu. Slīdi, kas atbilst motora nominālajai slodzei, sauc par nominālo slīdi. Mazas un vidējas jaudas asinhronajiem motoriem nominālā slīdēšana svārstās no 8% līdz 2%. Uz lauka orientēta kontroleļauj vienmērīgi un precīzi kontrolēt kustības parametrus (ātrumu un griezes momentu), bet tajā pašā laikā tā ieviešanai ir nepieciešama informācija par motora rotora plūsmas savienojuma virzienu un vektoru. Lai palielinātu efektivitāti un samazinātu suku nodilumu, daži ADFR satur īpašu ierīci (īssavienojuma mehānismu), kas pēc iedarbināšanas paceļ birstes un aizver gredzenus. Ar reostatisko palaišanu tiek sasniegti labvēlīgi palaišanas raksturlielumi, jo lielas griezes momenta vērtības tiek sasniegtas pie zemām palaišanas strāvu vērtībām. Pašlaik ADFR tiek aizstātas ar asinhronā elektromotora ar vāveres rotora un frekvences pārveidotāja kombināciju.![]() ,
,Enerģijas pārveidošana
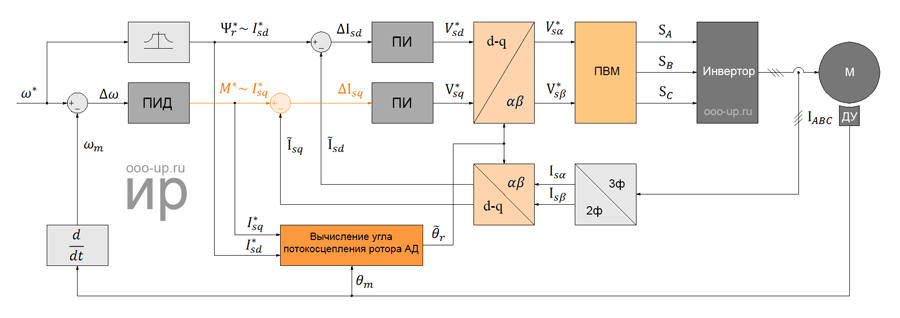 Uz lauku orientēta asinhronā elektromotora vadība ar rotora pozīcijas sensoru
Uz lauku orientēta asinhronā elektromotora vadība ar rotora pozīcijas sensoru Saskaņā ar metodi, kā iegūt informāciju par elektromotora rotora plūsmas savienojuma stāvokli, izšķir:
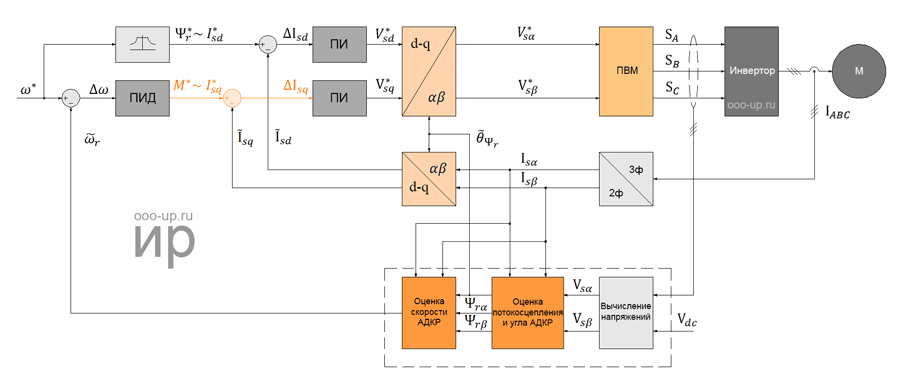 Uz lauku orientēta asinhronā motora vadība bez rotora stāvokļa sensora
Uz lauku orientēta asinhronā motora vadība bez rotora stāvokļa sensora