Трехфазный асинхронный двигатель
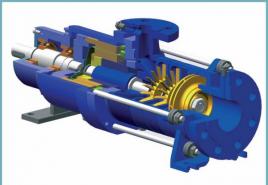
Состоит из двух основных частей - статора и ротора. Статор - неподвижная часть, ротор - вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор асинхронного двигателя
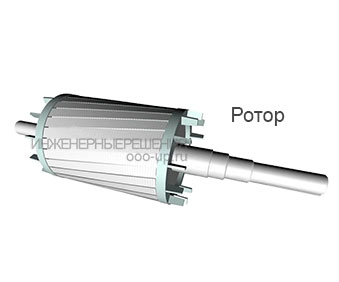 Ротор асинхронного двигателя
Ротор асинхронного двигателя
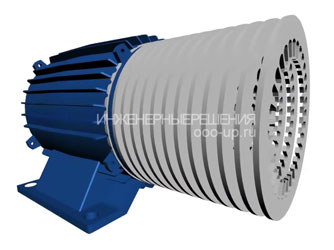
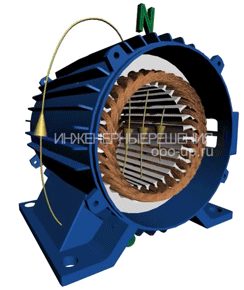
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
 Корпус и сердечник статора асинхронного электродвигателя
Корпус и сердечник статора асинхронного электродвигателя
 Конструкция шихтованного сердечника асинхронного двигателя
Конструкция шихтованного сердечника асинхронного двигателя
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Запустить
Остановить
Вращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f 1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
 ,
,
- где n 1 – частота вращения магнитного поля статора, об/мин,
- f 1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
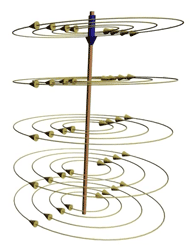
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Запустить
Остановить
Магнитное поле прямого проводника с постоянным током
 Магнитное поле создаваемое обмоткой
Магнитное поле создаваемое обмоткой
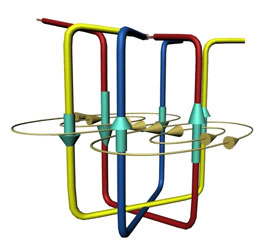
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
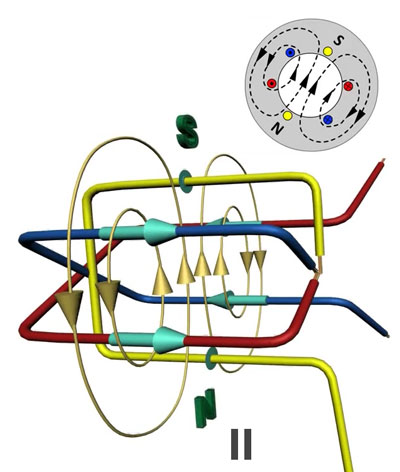
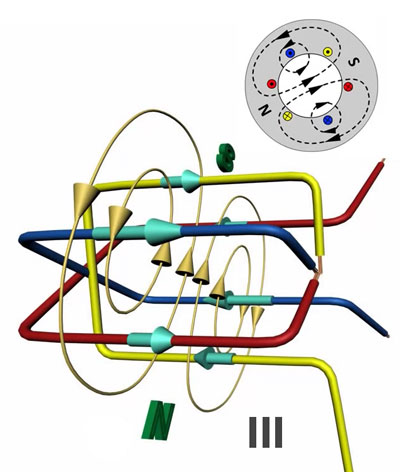
Магнитное поле создаваемое трехфазным током в разный момент времени
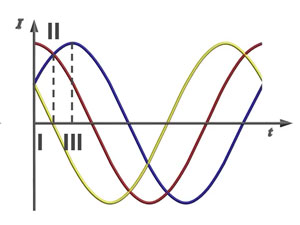 Ток протекающий в витках электродвигателя (сдвиг 60°)
Ток протекающий в витках электродвигателя (сдвиг 60°)
Запустить
Остановить
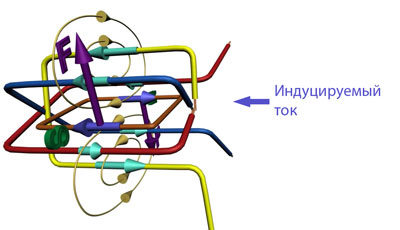
Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно будет действовать сила, в результате чего контур начнет вращаться.
 Влияние вращающегося магнитного поля на замкнутый проводник с током
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает . Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
 Короткозамкнутый ротор "беличья клетка" наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Короткозамкнутый ротор "беличья клетка" наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
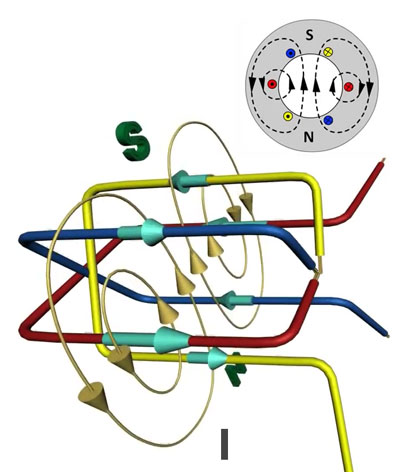
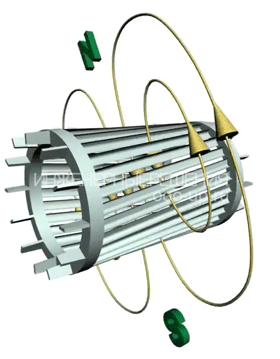
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Запустить
Остановить
Вращающееся магнитное поле пронизывающее короткозамкнутый ротор
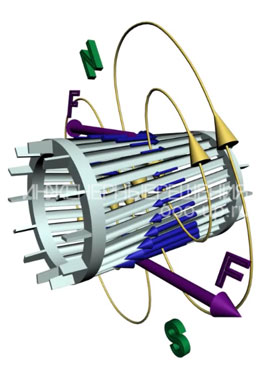
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n 2 меньше синхронной частоты вращения магнитного поля статора n 1 .
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n 2 Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости. Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0-100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 - режиму короткого замыкания, при котором ротор двигателя неподвижен (n 2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается. Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%. Полеориентированное управление
позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя. Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца. При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.![]() ,
,Преобразование энергии
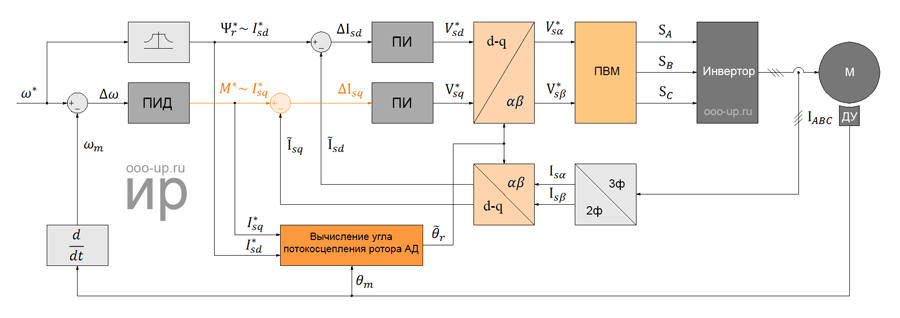 Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
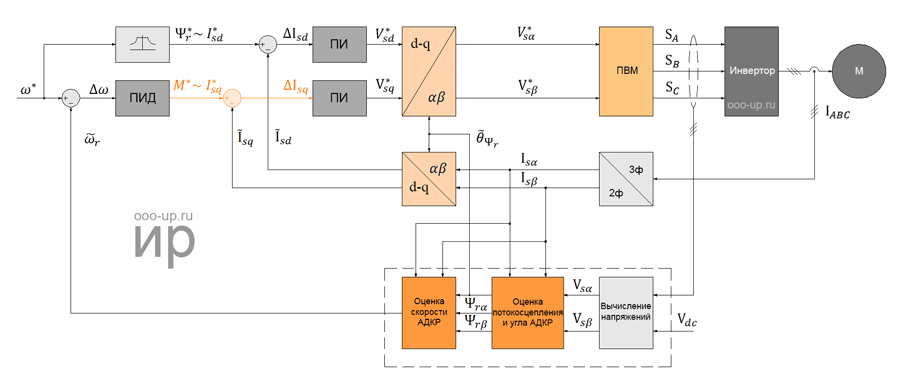 Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Полеориентированное управления асинхронным электродвигателем без датчика положения ротора